1. Implementazione dei metodi diretti per
sistemi lineari :
fattorizzazione LU ;
pivoting
Il metodo di eliminazione gaussiana, per la risoluzione di un sistema
di equazioni lineari, si basa sull'idea di ridurre il sistema A*x = b in un sistema
equivalente (cioè avente soluzione identica) della forma U*x = y , dove U è una matrice triangolare
superiore , e di risolvere questo sistema mediante sostituzioni
all'indietro. Per rendersene conto, leggere ed eseguire il seguente
m-file: eliminazione_gaussiana.m
Vediamo con un esempio come l'algoritmo appena mostrato sia equivalente
ad una fattorizzazione A=L*U
, seguita dalla soluzione dei due sistemi triangolari
(rispettivamente inferiore e superiore) L*y=b e U*x=y . Infatti,
consideriamo il sistema A*x
=
b , e:
- sostituiamo ad A
la sua fattorizzazione L*U
, ovvero vale A = L*U, e quindi il sistema
diventa: L*U*x = b ;
- poniamo U*x = y
,
che è un sistema lineare a matrice triangolare superiore , da
cui risulta L*y
= b , che è un sistema lineare a matrice
triangolare superiore ;
- ci ricaviamo y , conoscendo L e b , risolvendo il sistema
lineare L*y
= b mediante semplici sostituzioni in avanti;
- ci ricaviamo x
,
conoscendo U ed y , risolvendo il sistema
lineare U*x
= y mediante semplici sostituzioni all'indietro .
Leggere ed eseguire il seguente m-file: EG_equiv_fattLU.m
Esistono varie implementazioni possibili della fattorizzazione LU .
Ad esempio, le implementazioni degli algoritmi "kji" e
"ijk" sono contenute nel file fattorizzazioni_LU_e_Cholesky.m
.
Esercizio: guardare il
codice sorgente delle due
fattorizzazioni "kji" e "ijk" nel file appena
citato, "fattorizzazioni_LU_e_Cholesky.m";
sapreste dire quale dei due accede per righe e quale per colonne ?
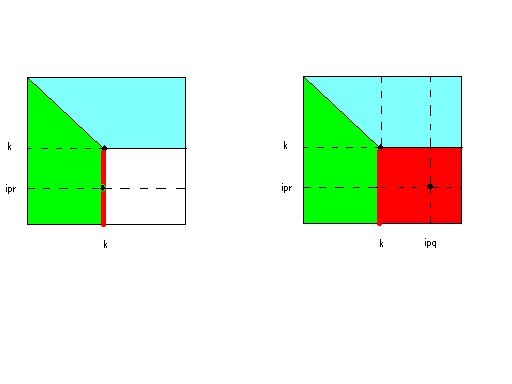
La tecnica del "pivoting":
Per evitare di trovarsi un elemento pivotale nullo o molto piccolo,
entrambe situazioni da evitare, in certe matrici è necessario
applicare la tecnica del "pivoting", che vediamo spiegata nella figura
seguente, rispettivamente per il pivoting parizale sulle righe
(sinistra) e per il pivoting totale (destra) :
dove l'elemento (k,k) è il pivot "naturale", mentre (ipr,k) e
(ipr,ipq) sono quelli determinati per ricerca del massimo valore nelle
rispettive zone colorate di rosso:
- per il pivoting parziale per righe la zona in rosso è la
porzione di colonna di indici (k:n,k) ;
- per il pivoting totale la zona in rosso è la
sotto-matrice di indici (k:n,k:n) .
Una volta determinato l'elemento pivotale , si procede allo scambio di
righe/colonne :
- si scambiano le righe "k" ed "ipr" nel pivoting parziale per
righe ;
- si scambiano le righe "k" ed "ipr" e le colonne "k" ed "ipq" nel
pivoting totale ;
Leggere ed eseguire il seguente m-file che implementa il pivoting
parziale (sulle righe) : LU_con_pivoting_su_righe.m
Esercizio:
scrivere un programma Matlab/Octave che esegua la fattorizzazione LU
con il
pivoting totale e provarlo su una matrice piccola (ad es. 5x5, in modo
da
poterla visualizzare facilmente) . Come verifica della correttezza
dell'algoritmo implementato nel programma, si può verificare che
'sum(sum(abs(A - L*U)))' dia un valore molto piccolo .